数学科
ルービックキューブ自動解析機2
3年I.M君
僕は小学生の頃からロボットに興味があり、 三回全ての労作展でロボット製作に挑戦した。 昨年の労作展で、 まだ誰も作ったことがないロボットを作ってみたいと考え、 正四面体のルービックキューブを元に戻す自動解析機を作った。 その時のロボット製作では慣れていた教育用レゴEV3を使ったが、 ロボットが元に戻す速度が自分よりも遅く、 動作が少し不安定だった為、 今年はさらなる進化を目指し、 ロボットを部品から組み立てることにして、 同じテーマに再チャレンジした。
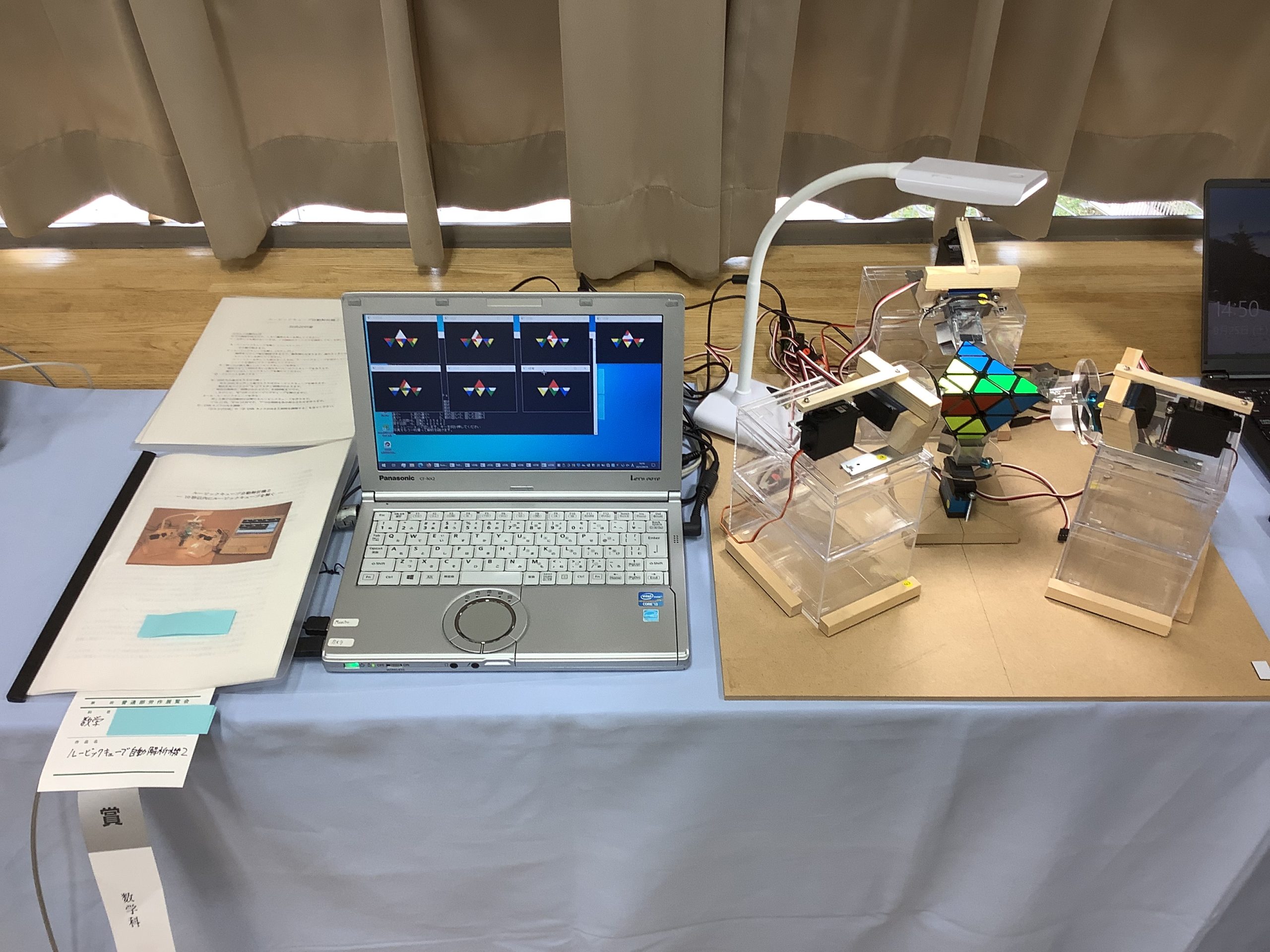
装置はC言語でプログラムしたノートパソコンとロボットから出来ている。 ロボットの真ん中にルービックキューブを置くと、 三つの面の色を検出し、 元に戻す解法を一瞬で見つけ、 戻し方を表示し、 実際にロボットが十秒以内に元に戻す。 さらに、 解くだけでなく 「解くのが難しいルービックキューブを作る」 こともできる。
この装置には僕の多くのこだわりがつまっている。 ロボットが自らルービックキューブの頂点を掴み戻す事、 十秒以内で色を揃える事、 色を間違いなく検出して頂点を百二十度きっちり回す事、 どんな色の組み合わせでも必ず解く事等である。 高速で確実に戻す為にモータの選定や、 頂点を換えチャックの構造とその出し入れ機構の検討等の事前準備をしっかり行ない、 十分な精度が出るように丁寧に組み立て、 実験で仕上げた。
どんな組み合わせでも必ず解く方法は予期せず実現出来た。 解法を考える前に必要な最大回転回数を見つけられないかと思い、 それが十一であることをシミュレーションで証明したとき (「新しい色の組合せが出なくなるまでには何回回せばよいか」 を求めれば良い)、 約百万通りのすべての回の組み合わせとそれを作るための頂点の回転手順のデータも得ることが出来た。 このデータを作ることで、 必ず解るようになった上、 解法を見つける時間を短くでき、 さらに、 解くのが難しいルービックキューブを作れるようになった。 ロボットが扱う対象物を事前に研究することが重要だと実感した。
こだわりの機能を表現でき、 労作展と特別展示の間問題なく動作して多くの人に触れてもらえて達成感で一杯だ。 また、 賞も頂けて嬉しかった。 労作展は自分のやってみたいと思うことを思う存分やれる場で、 画像処理、 色のHSV表現。 モータの制御など授業では出てこないことを学べた。 製作途中でつらいこともあったが、 振り返ると大きなテーマに連続してチャレンジ出来る素晴らしい行事だと思った。 この経験を今後に活かしていきたい。